CS 495/CS 595 Geospatial Vision and
Visualization, Fall 2010
Computer Science Department, Illinois
Institute of Technology
Time: Tuesday 6:25 –
9:05pm
Professor: Xin Chen, Ph.D. Senior
Research Scientist at NAVTEQ
Description:
Geospatial information has become ubiquitous in everyday life, as
evidenced by on-line mapping services such as Microsoft Virtual
Earth/Bing Map, the recent addition of "place" features
on social network websites such as Facebook, and free navigation
on Nokia smart phones. Behind the scenes is digital map content
engineering that enables all types of location-based services.
Course material will be drawn from the instructor's research
experience at NAVTEQ, the Chicago-based leading global provider of
digital map, traffic and location data. This course will provide
comprehensive treatment of computer vision, image processing and
visualization techniques in the context of digital mapping, global
positioning and sensing, next generation map making, and
three-dimensional map content creations. Real world problems and
data and on-site industry visits will comprise part of the course
curriculum.
Lunch and Learn at NAVTEQ Headquarters on December 3, 2010

CTO Amreesh Modi shares his insights on the geospatial industry with Geospatial Vision and Visualization students.

Geospatial Vision and Visualization students get a behind-the-scenes look at NAVTEQ True, the next generation mapping technology.

Professor Xin Chen, a Senior Research Scientist at NAVTEQ, welcomes Geospatial Vision and Visualization students to NAVTEQ.

Geospatial Vision and Visualization students network with NAVTEQ R&D members.

Geospatial Vision and Visualization students toured the traffic studio that houses NBC Channel five and several radio stations including National Public Radio (NPR) and local celebrity Sarah Jindra.

Geospatial Vision and Visualization students present their final course projects to CTO, Amreesh Modi and R&D senior managers and staff.
Featured Final Course Projects (Each of the 24 students was able to develop a final project within a month time)
|
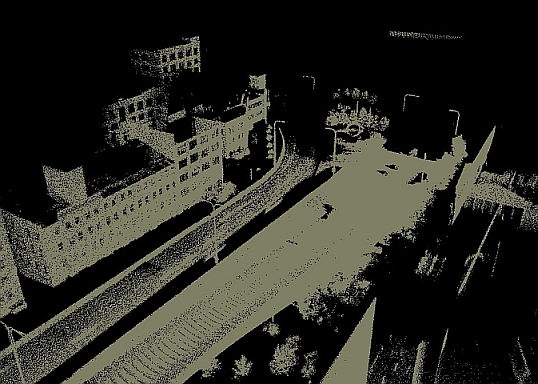
Real-time City-scale LIDAR Rendering Hongwen Huai and Hongwu Huai This project is to render city scale LIDAR 3D point cloud in real time. The challenges are limited system and video memories and lack of computation capabilities on consumer level graphics cards. We implement streaming by searching, loading, saving and rendering all the visible data from the original 80GB raw data. Level of Detail (LoD), camera culling, Octree and Kdtree are implemented in the pipeline. |
|
|
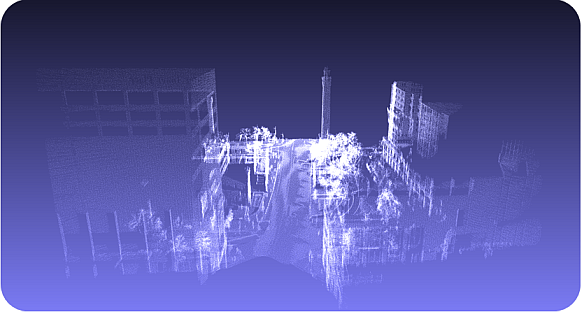
Hole Filling for 3D LIDAR Point Cloud Xi Zhang Geospatial information is obtained by their acquisition devices like panaroma camera and LiDAR scanner. The data obtained by 3D scanner, after registered is a scene of real world which is composed by 3D point cloud. However, because of many unpredictable reasons like running car, accuracy of scanner and occlusion, the scene is always noisy and contains some holes in it. So in this project, we address the problem of post-processing of street view LiDAR data, and try to fill the hole appearing on the road. |
|
|
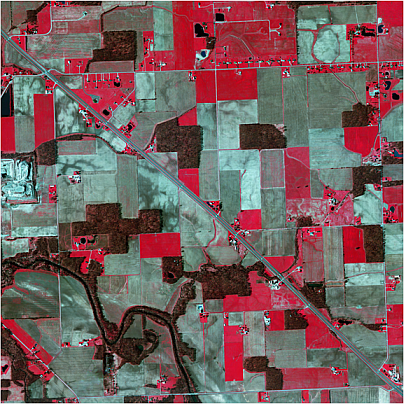
Color Infrared Satellite Photo Feature Extraction Xiaomu Liu In this project, we will extract and classify feature from color infrared satellite/aerial image. First, we will briefly talk about the purpose of this project. Next, we will illustrate the methods of classification. Finally, we will show and assess the results as well as give some advices on future improvement. |
|
|
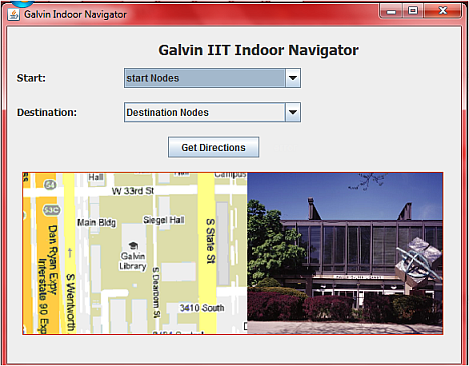
Indoor Navigation Syeda Fatima Rizvi, Het Joshi, Asad Akram This porject implements a prototype of Indoor Navigation system. we survey Galvin Library at IIT; map it to grid object; gather information relating to grid object; use panorama and navigation algorithm to get directions within the building. we applied what we learned in this course. |
|
|
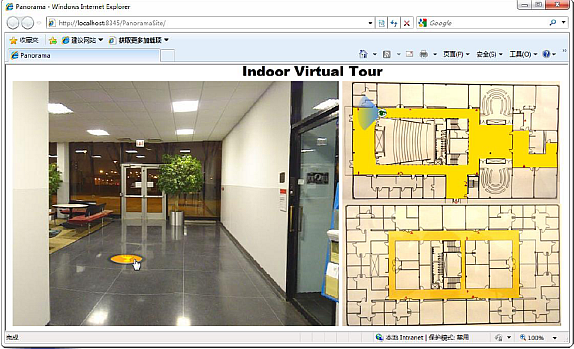
Indoor Virtual Tour Qi Zhao, Jiayu Ji, Peng Yao This project is to develop a system which is able to provide panoramic view of a pecific building. It is a web-based system so that it can be run on different platform. Also, it will provide maintainability which allow user to maintain the panoramic photos and floor map themselves. Due to the time constraint, we collect data from Stuart Building only to test the system. |
|
|
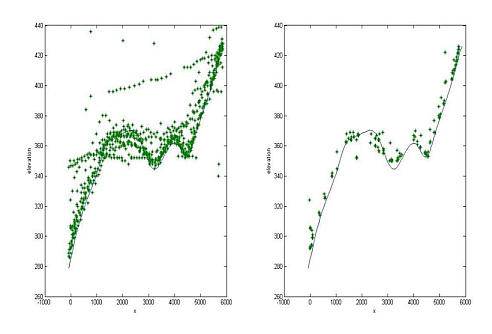
Cell Phone Probes for ADAS Aravind Lekshminarayanan, Kamalesh Kumar, Reda Bouaichi The main goal of our project is to model the road geometry from cell phone probe data so as to be used in ADAS systems. The road geometry includes vertical slopes and horizontal curvatures. The given probe data are recordings from a large number of cell phones with latitude, longitude, elevation and other information, as well as the ground truth from GPS+IMU data collection. So, the objective is to derive the road geometry automatically using only the probe data or both probe data and maps. |
|
|
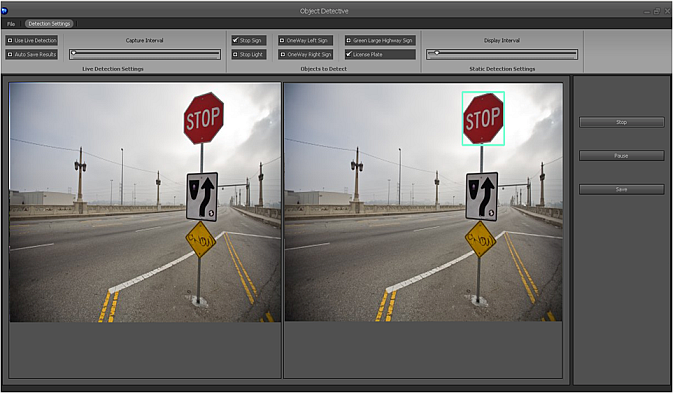
Sign Detection Dipti Sharma, Hema B.S., Sugar LanCrét In this project we have implemented an object detector that detects stop signs and license plates in static pictures as well as in live video. This project is implemented mainly using the SURF (Speeded Up Robust Features) algorithm which is a robust image detector & descriptor. In the process of implementing an object detector, we also studied about other object detection algorithms like template match and Haar-based object detection. This report includes a detailed description of the working mechanism of these three algorithms and discusses the pros and cons of each. This is followed by the workflow and architecture of our object detector application. |
|
|
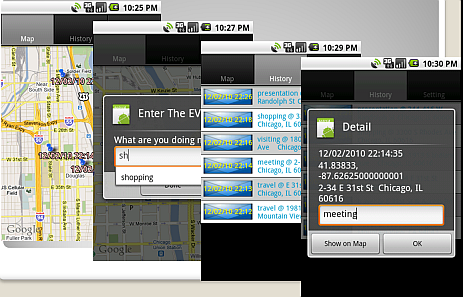
LBS Survey and Application Dun Liu This project is to survey the current state of location based services in the U.S.. We proposed and implemented a novel LBS applicaiton on IPhone. In contrast to PlanCast, our application logs the events that have happened. |
|
|
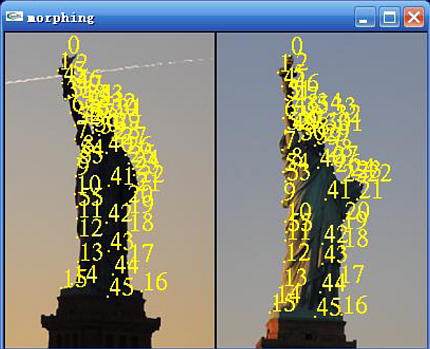
Landmark Morphing Jingjing Lu This project is to implement a scene photos morphing software. Before morphing, the two warping processes are needed by two source images separately. In the program, users could interactively choose a set of control points in two pictures respectively, and also could choose the intersteps warping process needed, meanwhile in every run, the control points could be saved as a file. |
|
|
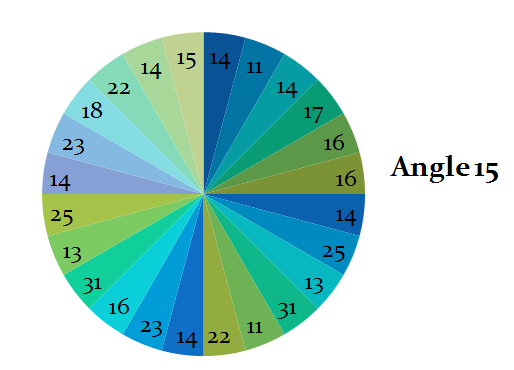
Object Detection Weihui Yu This project tested object detection algorithm SIFT by experimenting variations of geometric, localization, rotation, resolution, lighting, noise and object types. |
|
Guest Lecture: Learning from Founding a Geospatial Startup by Zhong Chen, Founder and President of Dynasty Group, November 9, 2010

Zhong shares his entrepreneurial experience with Geospatial Vision and Visualization students.
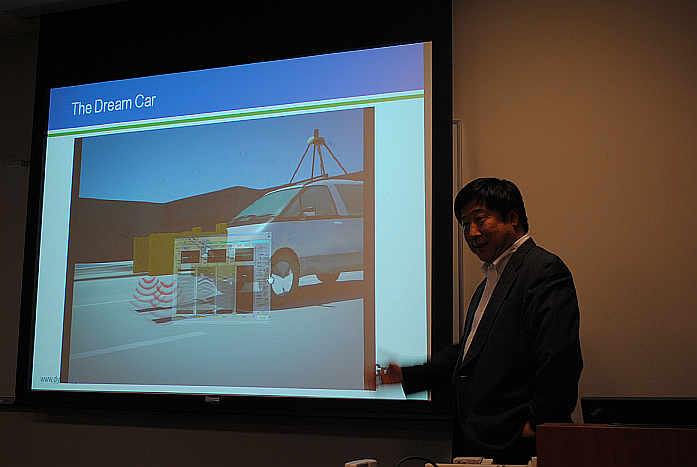
Zhong presents his “dream car” for mobile data collection.